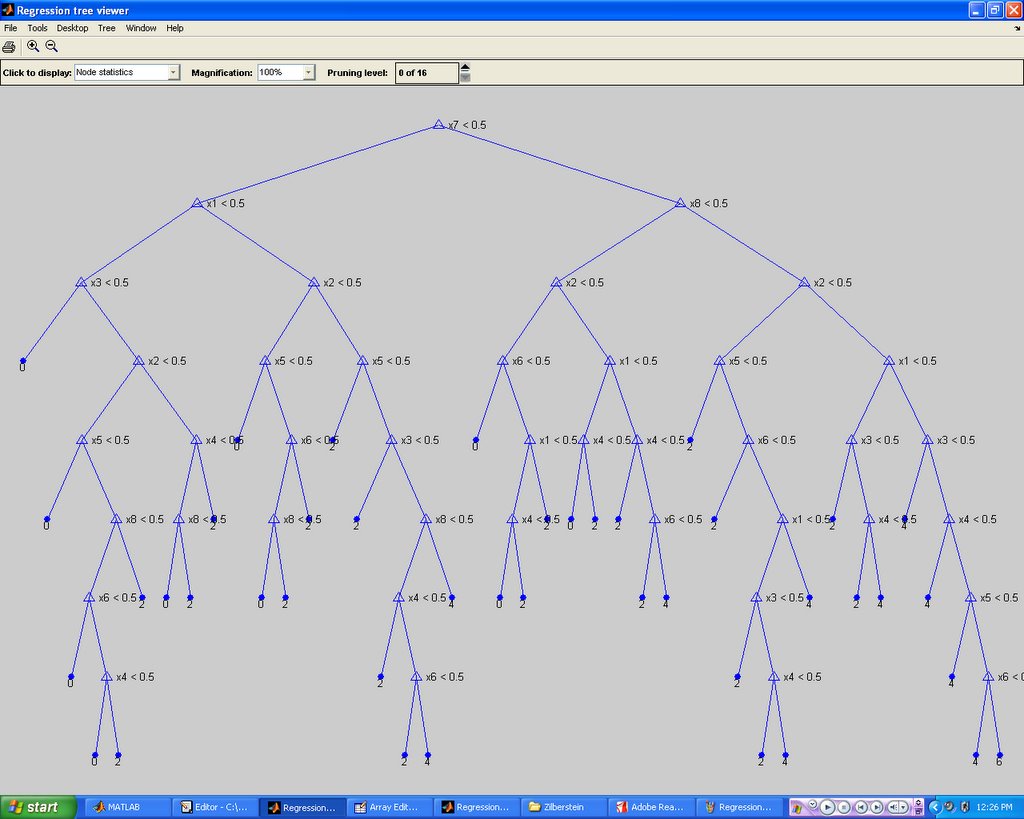
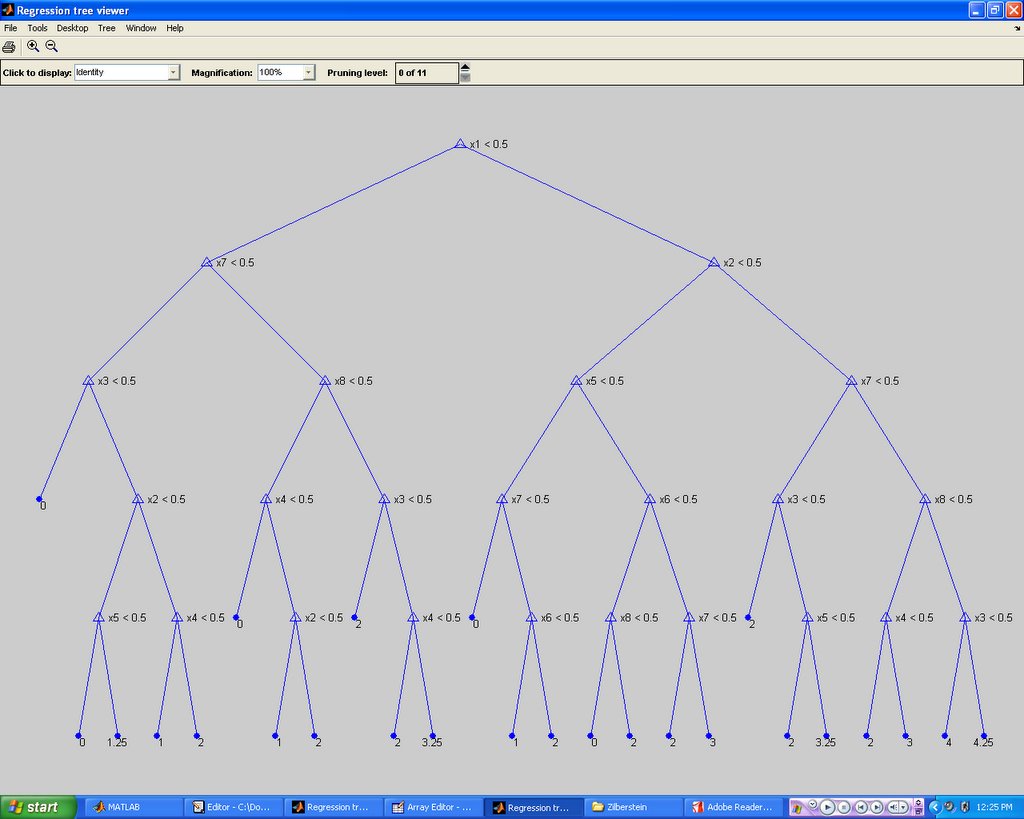
Regression Tree for (0,2) vs. Optimal Solution

This regression tree was generated with binary arc states. The treefit function was called with a list of all possible combinations of arc costs and was regressed against the list of corresponding optimal solutions.
Although this tree is different than the one given below, I believe that they contain equivalent information. Since the problem is symmetric, arcs 1 and 7, 2 and 8 and so forth should have equivalent prediction power.
posted by Hon Fai at 10:03 AM
0 comments
![]()





{kind=link}